Mobile crane MK1

First part of the W.I.P.: the chassis
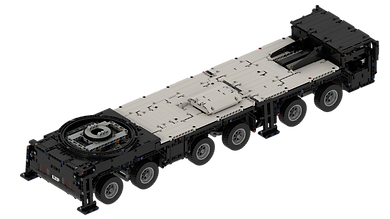
So, I first made this chassis without any bodywork and I tryed to include all the functions I wanted to be in there. It is already quite big with a 100*21*12 (L*l*h) studs body. Their is 4 function inside wich are:
1- A 4 speed sequential gearbox remote controlled via a PF M motor.
2- The 4th and 5th axle are driving with 2 PF XL motors through the gearbox.
3- The 8 wheels arround are turning with a different turning radius on the inner wheels via a PF servo motor.
4- Their is 4 outrigers that can deploy via a PF L motor.
So in total we have 5 motors inside. We can mention that the steering wheel is also turning with a realistic radius an the fake V8 engine is also running faster an is not affected by the gearbox (as a real one should do). The truck as also light wich are turning on when the truck is driving.
To power and control this MOC I used 1 Buwizz brick and a few extension wire.



Second part of the W.I.P.: the body work
The next step after finishing the chassis was the bodywork and I struggled a bit for this part.
I started by putting panel on the top to smooth everything a bit then I worked on the rear end with a result that I'm quite proud of. After I tried to make the front wich was a pretty hard part and the seat that we could see in the "naked" chassi were re-worked completely and you can se them a bit on the picture that show the front. I'm pretty happy with how it turned out even if I don't really like the doors I have made.
You may also take in consideration that the color scheme is not right but that's because of the part I have, It is supposed to be in black and white but you will see that a little bit later.

third part of the W.I.P.: end of this W.I.P.
Here you can see a little size comparison with the 42108 set and one of the many prototype of an arm. This one was pretty nice, with three section and an extension of 1.7 m out of 0.65 m.
Unfortunately I decided to stop this chassis because it has many flaws:
1- The gearbox do not handle well the weight and crack a lot.
2- The outrigers are too small.
3- Their is a little bit of structural instability.
4- Because of the 4 middle wheel driving it tend to slip a lot.
So I'm stopping there for this one and I will try to go for an other one.
.png)
.png)
Fourth part of the W.I.P.: 3D model
Before I decided to stop I still took the time to make a 3D model of this truck with the correct color scheme and a few correction. There is more than 3000 parts.
If you are interested I can give you the 3D model made with stud.io from Bricklink. I will just send it to you by mail because it is a lot of work and I'm not easy with giving it freely like this. you must also know that you may not share it or appropriate it neither.



Fifht part of the W.I.P.:
Start from zero
For now I am re-working from scratch and made a few prototype of different things.
On the first picture you can see a new type of 4 speed sequential gearbox that is now controlled via a PF servo motor for easier use and better stability. The gearbox is also reinforced a lot to prevent the gear from skipping. I have made a few load test and it seems to handle it pretty nicely so now I have to make it a bit smaller and "blocky".
On the second picture it is a test of some steering and driving axle to use and make 12*12 wheel drive instead of a 4*12 to prevent the slipping. I am not really happy with this so there is a lot of work left for this and also because I would like to add suspension on all wheel so yep still some work on that.
On the third picture it is a prototype of new stabilisier that can extend much further than the old ones the only down part of this is the requirement of a second function to lower them so it will mean some re-work also on the motor placement etc etc.
I also have in plan to make the truck 1.5 time bigger and use de 94.3 wheels instead of the current 62.4 and that is why I think I can fit in some suspension.
Well it is all for now and the next update will be in the new tabs "Mobile crane MK2" when it will be ready.